Многоканальные измерительные системы для мониторинга и контроля состояния сложных распределенных объектов и сооружений, в т.ч. с использованием возможностей систем ГЛОНАСС/GPS
НПП «ПАРК-ЦЕНТР» по данному направлению выполнило ряд опытно-конструкторских работ, на основе которых была сформирована концепция построения систем мониторинга технически сложных объектов и сооружений.
Концепция построения систем мониторинга технически сложных объектов и сооружений
Система мониторинга технически сложных объектов и сооружений может использоваться для контроля состояния технически сложных объектов и сооружений (ТСО) наземной инфраструктуры в различных отраслях промышленности.
Система предназначена для измерений деформаций и перемещений в различных точках ТСО и проведения непрерывного круглосуточного мониторинга ТСО по различным критическим параметрам, в частности, по опасным смещениям, напряженно-деформированному состоянию, а также вибрации, температурам и т.п., с автоматическим оповещением всех необходимых потребителей о наступлении предаварийных и аварийных состояний ТСО.
Система решает следующие основные задачи:
- измерение сигналов тензорезисторов, термопреобразователей сопротивления, термоэлектрических преобразователей, датчиков с унифицированным выходным сигналом напряжения и силы тока, измерение уровня вибраций;
- измерение перемещений с сантиметровой точностью объектов протяженностью до 10 км с использованием возможностей глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС и GPS;
- передача результатов обработки и измерений в сервер центра мониторинга;
- автоматическое определение (в реальном времени и в постобработке) параметров положения, движения, колебаний (трехмерных деформаций), напряженно-деформированного состояния, температур и вибраций ТСО;
- автоматическое формирование сигналов о достижении ТСО предельных (заданных) параметров состояния, автоматическая выдача сигналов оператору и внешним потребителям;
- управление с автоматизированного рабочего места оператора режимами работы системы;
- автоматический контроль и диагностика функционирования системы, индикация неисправностей;
- автоматическое документирование информации о состоянии ТСО и о функционировании системы.
Спецификой системы является работа как с традиционными датчиками деформаций и перемещений, так и измерение перемещений объектов протяженностью до 10 км с сантиметровой точностью с использованием возможностей ГНСС ГЛОНАСС и GPS.
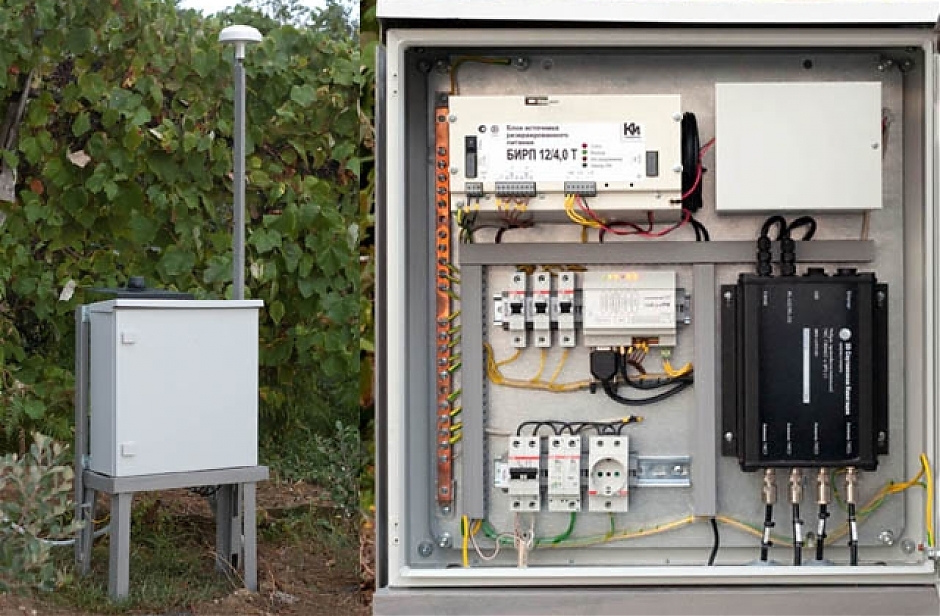
Оборудование системы, принимающее сигналы от датчиков, может эксплуатироваться на открытых пространствах и в неотапливаемых помещениях в широком диапазоне температур.
Структурная схема системы приведена на рисунке:

Система имеет переменный состав и включает следующие основные технические средства:
- многоканальные измерительные устройства УИУ 2002 (разработки НПП «ПАРК-ЦЕНТР») для работы с различными промышленными датчиками (тензорезисторами, термопреобразователями сопротивления и т.п.), обеспечивающие сбор сигналов по проводным линиям связи;
- многоканальные устройства измерений вибраций ТСО;
- модули приемные ГНСС ГЛОНАСС и GPS, обеспечивающие высокоточное определение относительных смещений ТСО;
- комплект средств связи, обеспечивающий высокоскоростную передачу информации от измерительных компонентов системы по проводным линиям связи на расстояние до 5 км в сервер центра мониторинга;
- комплект средств связи, обеспечивающий передачу измерительной информации по беспроводным технологиям (в частности, GPRS) в центр мониторинга;
- сервер центра мониторинга, обеспечивающий сбор, обработку и архивирование измерительной информации в центре мониторинга;
- автоматизированные рабочие места операторов (АРМ), обеспечивающее управление системой, визуализацию данных, архивирование и постобработку информации, выдачу сообщений о достижении ТСО опасных параметров состояния.
Измерение перемещений с сантиметровой точностью с использованием возможностей глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС и GPS
Среднеорбитальные ГНСС ГЛОНАСС и GPS предназначены для определения местоположения потребителей, а также точного времени.
Полностью развернутая ГНСС ГЛОНАСС состоит из 24 навигационных космических аппаратов (НКА), находящихся на круговых орбитах высотой 19100 км, наклонением 64,8° и периодом обращения 11 ч 15 мин в трех орбитальных плоскостях. Орбитальные плоскости разнесены по долготе на 120°.
Полностью развернутая ГНСС GPS состоит из 24 НКА, находящихся на круговых орбитах высотой 20180 км, наклонением 53° и периодом обращения 12 ч в шести орбитальных плоскостях.
Такая конфигурация НКА позволяет обеспечить непрерывное и глобальное покрытие земной поверхности и околоземного пространства навигационным полем.
Наземная сеть управления осуществляет контроль правильности функционирования НКА, непрерывное уточнение орбит, выдачу на НКА команд управления и навигационной информации.
Спутниковые передатчики радиосигнала очень точно синхронизированы, что позволяет им формировать одинаковые по структуре радиосигналы в одно и то же время. Эта структура или код представляет собой сложную псевдослучайную последовательность (ПСП) импульсов.
Сигнал НКА представляет собой модулированную кодом ПСП несущую частоту и эфемеридную информацию (ЭИ).
ЭИ представляет собой набор блоков информации, в которых содержится код НКА, метка времени, собственные координаты НКА, альманах и некоторые поправочные коэффициенты.
Альманах представляет собой данные, необходимые для расчета расписания предстоящих сеансов связи с НКА, состояние НКА и другую служебную информацию.
Работа аппаратуры основана на определении времени, в течение которого радиосигнал от НКА достигает приемной антенны, и вычислении расстояния до НКА.
Аппаратурой выполняются беззапросные измерения псевдодальности, а также прием и обработка навигационных сообщений, включая ЭИ и альманах, содержащихся в составе спутниковых навигационных радиосигналов.
Местоположение точки наблюдения при использовании аппаратуры по сигналам ГНСС может определяться двумя методами — абсолютным и дифференциальным.
Абсолютный метод определения координат заключается в том, что приемник вычисляет свои координаты в реальном времени только на основе информации, полученной непосредственно от НКА. Абсолютный метод предполагает получение координат одним приемником. При этом реализуется традиционный метод пространственной линейной засечки (прямая геодезическая засечка) положения приемника относительно НКА.
В состав навигационного приемника аппаратуры входит генератор такой же ПСП, какую излучает НКА СНС. Сдвигая фазу ПСП своего генератора, измеритель аппаратуры добивается ее совпадения с фазой ПСП принимаемого сигнала. Величина временной задержки фазы ПСП дает информацию о дальности до НКА.
Зная это расстояние и точные координаты НКА на момент излучения принятого сигнала, можно определить координаты приемной антенны. Обрабатывая полученную ЭИ, аппаратура выделяет метку времени НКА и сравнивает с меткой времени, вырабатываемой самой аппаратурой и вычисляет дальность до каждого из наблюдаемых НКА.
Кроме неизвестных координат, аппаратура определяет величину рассогласования шкал времени собственного генератора и НКА, для чего необходима дополнительная информация — получение дополнительного измерения от еще одного НКА.
Таким образом, для определения трех координат с учетом имеющегося рассогласования шкал времени необходимо иметь измерения не менее чем от четырех НКА одной ГНСС для решения систем из четырех уравнений для четырех неизвестных (пространственные координаты аппаратуры и время).
В связи с тем, что шкала времени ГНСС GPS может не совпадать со шкалой ГНСС ГЛОНАСС, при работе по смешанному созвездию космических аппаратов количество неизвестных увеличивается на единицу. Соответственно, для трехмерного определения координат требуется информация от пяти НКА, для двухмерного — от четырех НКА.
Таким образом, для определения своих координат аппаратура:
- производит с высокой точностью измерение фазы кода ПСП принимаемых сигналов НКА;
- декодирует служебную информацию, передаваемую НКА (ЭИ и альманах);
- определяет момент времени излучения сигнала НКА;
- вычисляет точное местоположение НКА на момент излучения принятого сигнала;
- рассчитывает дальности до НКА и по этим данным определяет свои координаты.
В системе мониторинга ТСО используется более точный дифференциальный метод определения относительных координат разнесенных антенн.
Одна из антенн ГНСС является опорной, относительно которой определяется взаимное высокоточное положение остальных антенн ГНСС.
Для высокоточного определения координат, кроме стандартных измеряемых радионавигационных параметров, используются результаты измерений по фазе несущей радиосигналов каждого НКА для каждой из используемых антенн.
В аппаратуре ГНСС системы мониторинга ТСО осуществляется совместная обработка результатов этих измерений, с использованием специального программно-математического аппарата для устранения неоднозначностей фазовых измерений, которая позволяет получить проекции линий, соединяющих фазовые центры антенн (антенных баз) с высокой (сантиметровой) точностью.
Демонстрационный образец системы спутникового мониторинга
Для демонстрации потенциальным заказчикам измерений перемещений с использованием возможностей глобальных навигационных спутниковых систем ГЛОНАСС и GPS на предприятии разработан и изготовлен демонстрационный образец системы спутникового мониторинга.
В составе демонстрационного образца имеется четыре антенны для определения навигационных параметров (одна опорная, три рабочих), средняя квадратическая погрешность определения текущих значений навигационных параметров (при полностью развернутых ГНСС ГЛОНАСС и GPS и отсутствии затенения антенн для базовых линий) составляет для плановых координат — 10 мм, для высоты — 15 мм.
Структурная схема демонстрационного образца приведена на рисунке.
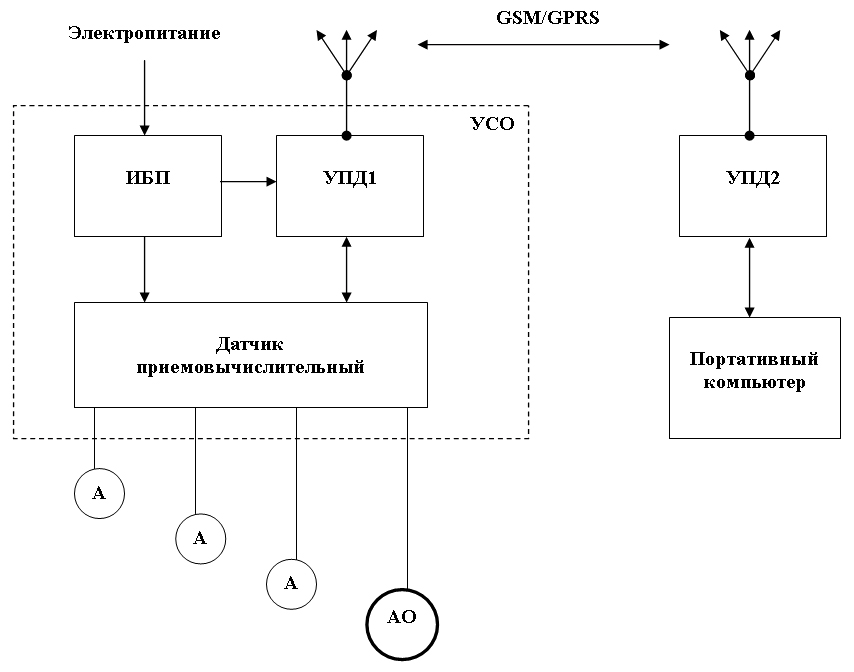
На структурной схеме показаны следующие основные узлы:
- А — антенна ГЛОНАСС/GPS;
- АО — антенна ГЛОНАСС/GPS опорная;
- ИБП — источник бесперебойного питания;
- УПД — устройство передачи данных;
- УСО — устройство связи с объектом.
Принцип действия системы мониторинга состоит в следующем. На исследуемом объекте устанавливаются три «подвижных» антенны ГЛОНАСС/GPS и одна «неподвижная» опорная антенна ГЛОНАСС/GPS. Наличие смещений «подвижных» антенн относительно опорной антенны может говорить о критичных изменениях в исследуемом объекте.
Датчик приемовычислительный определяет значения смещений антенн относительно опорной антенны и с заданной частотой выдает полученные значения через устройства передачи данных УПД1 и УПД2 на компьютер центра мониторинга.
Связь между УПД1 и УПД2 осуществляется по GPRS-радиоканалу оператора сотовой связи стандарта GSM.
Источник бесперебойного питания (ИБП) обеспечивает электропитание датчика приемовычислительного и УПД1 от сети питания переменного тока с защитой от кратковременных пропаданий напряжения сети питания.
Оборудование системы, размещаемое на объекте мониторинга, конструктивно выполнено в виде устройства связи с объектом (УСО).
Программное обеспечение системы, устанавливаемое на компьютере центра мониторинга, обеспечивает:
- прием потока данных о смещениях антенн от оборудования системы, размещаемого на объекте мониторинга;
- сохранение информации;
- визуализацию данных о смещениях антенн.
Сохраненная информация является доступной для считывания и передачи потребителям.
Основные заказчики работ и партнеры по данному направлению:
- ОАО «Научно-производственная корпорация «РЕКОД», г. Москва;
- ООО «3Д спутниковая навигация», г. Санкт-Петербург;
- ООО «Фарватер», г. Санкт-Петербург;
- ОАО «Авангард», г. Санкт-Петербург.